제품




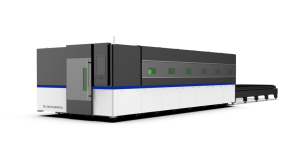
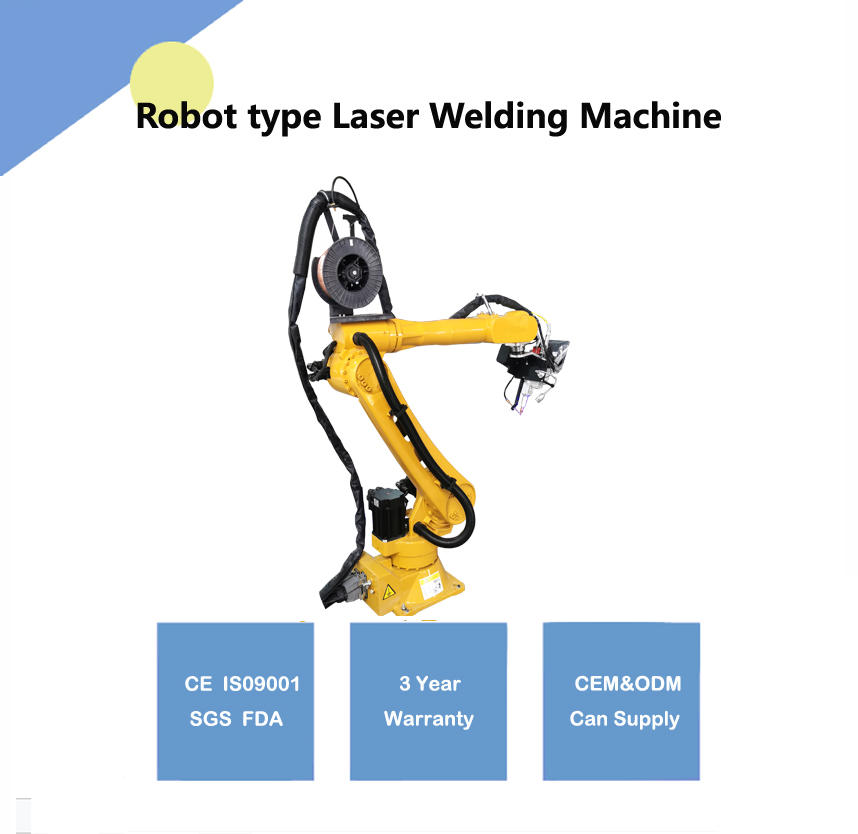
로봇형 레이저 용접기
제품 디스플레이
기술적 매개변수
| 6축 로봇 | 툴링 | 핵심 구성 요소 | 레이저 소스 |
| 용법 | 용접 금속 | 최대 출력 전력 | 2000와트 |
| 적용 가능한 재료 | 금속 | CNC 또는 아님 | 예 |
| 냉각 모드 | 수냉 | 전기 및 공압 시스템 | 슈나이더 |
| 파장 | 1090Nm | 레이저 파워 | 1000w/ 1500w/ 2000w |
| 무게(kg) | 600kg | 인증 | CE, ISO9001 |
| 핵심 구성 요소 | 파이버 레이저 소스, 파이버, 핸들 레이저 용접 헤드 | 주요 판매 포인트 | 높은 정확도 |
| 기능 | 금속 부품 레이저 용접 | 섬유 길이 | ≥10m |
| 적용 산업 | 호텔, 의류 매장, 건축 자재 매장 | 핵심 구성 요소 | 레이저 소스 |
| 작동 모드 | 펄스 | 보증 서비스 후 | 온라인 지원 |
| 초점 직경 | 50㎛ | 최대 보장 범위 | 1730mm |
| 비디오 출고 검사 | 제공됨 | 지원되는 그래픽 형식 | AI, Plt, DXF, DWG, DXP |
| 원산지 | 산둥성 지난 | 보증 기간 | 3년 |
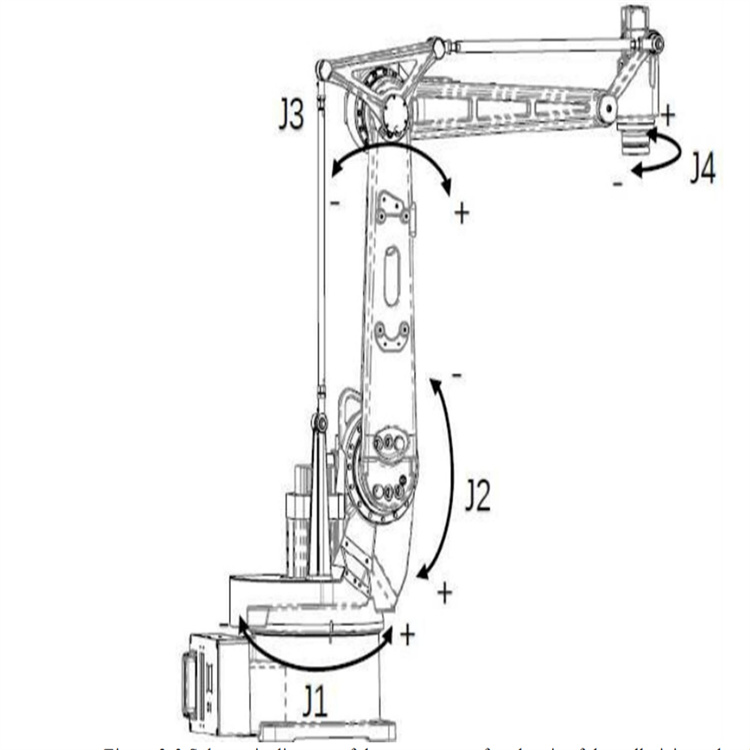
로봇 팔
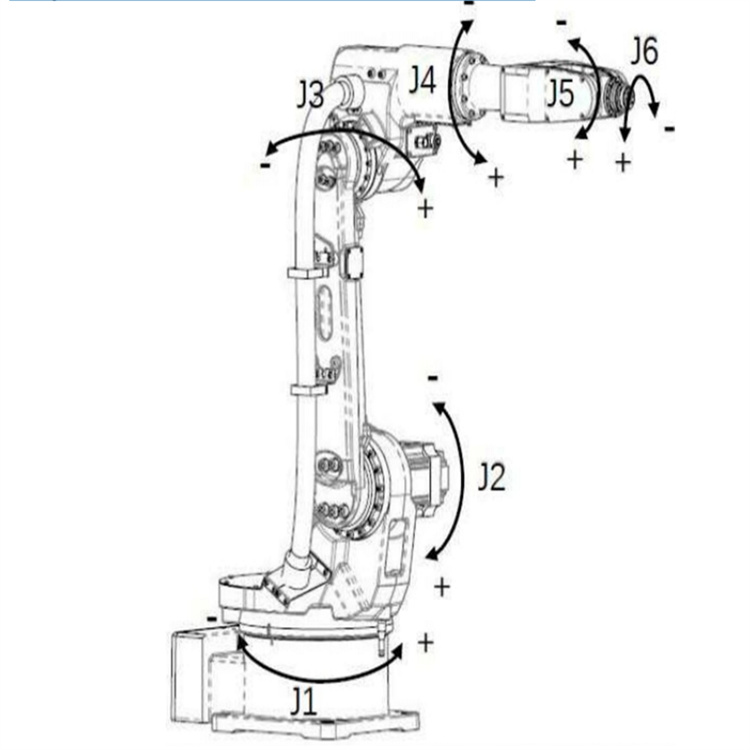
로봇 축은 회전축 또는 이동축일 수 있으며, 축의 작동 모드는 기계 구조에 따라 결정됩니다. 로봇 축은 로봇 본체의 운동축과 외부 축으로 구분됩니다. 외부 축은 슬라이딩 테이블과 포지셔너로 구분됩니다. 달리 명시되지 않는 한, 로봇 축은 로봇 본체의 운동축을 의미합니다.
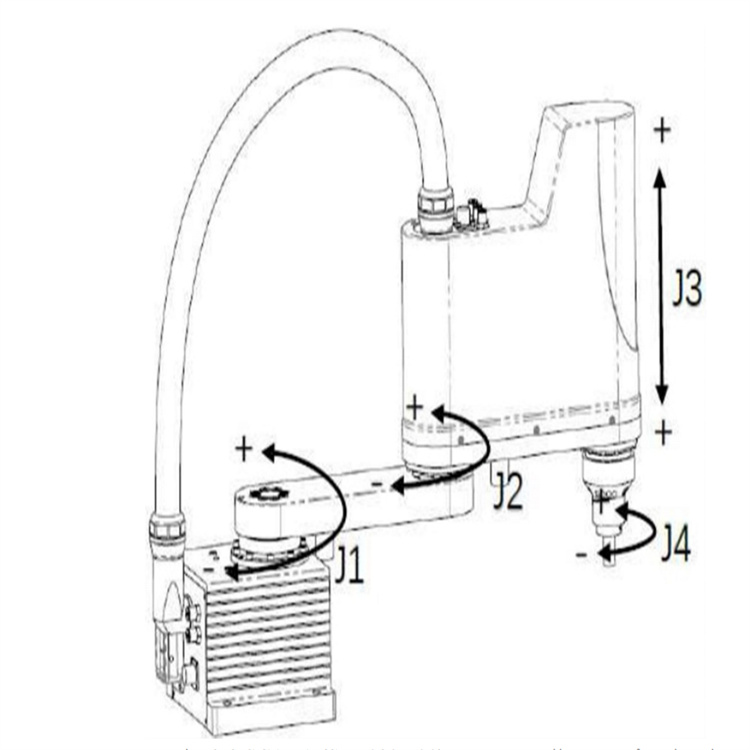
튜링 로봇은 세 가지 유형의 산업용 로봇으로 구분됩니다.
산업용 6축 로봇: 6개의 회전축 포함
SCARA: 3개의 회전축과 1개의 이동축을 포함합니다.
팔레타이징 매니퓰레이터: 4개의 회전축 포함 로봇의 관절 동작은 그림과 같습니다.
로봇용접기의 응용
1. 기계 제조 분야
기계 제조 산업에서 용접 작업이 증가함에 따라 용접 작업은 본질적으로 열악한 작업 환경과 높은 열 방출을 수반하는 매우 위험한 작업입니다. 또한 기계 제조에는 대형 장비가 많아 용접 작업의 난이도가 더욱 높아집니다. 용접 로봇은 용접 작업에 사용되는 자동화된 기계 장비로, 작업자의 노동 강도를 완화하고 기계 제조 분야의 자동화 수준을 향상시키는 데 기여합니다.
2. 자동차 및 자동차 부품 :
최근 몇 년 동안 자동차 산업은 대중의 요구를 충족하기 위해 다각화되고 발전해 왔습니다. 기존 용접 방식은 자동차 및 자동차 부품 제조 분야의 높은 용접 요건을 충족할 수 없습니다. 용접 이음매는 아름답고 견고해야 합니다. 많은 현대식 자동차 생산 공장에는 용접 로봇 조립 라인이 구축되어 있습니다.
3. 전자 장비:
전자 장비 분야는 용접 품질에 대한 요구가 비교적 높습니다. 사회 전반의 전자 장비 수요 증가에 따라 전자 장비 또한 급속한 발전과 함께 심각한 과제에 직면하고 있습니다. 용접 로봇은 생산 효율을 보장하는 동시에 용접 품질을 안정적으로 유지할 수 있습니다. 장비의 정밀 용접은 수작업보다 3~4배 더 높습니다.
4. 항공우주:
항공기 구조에는 약 1,000개의 동체 용접 부품이 있으며, 약 10,000개의 부품이 관련됩니다. 항공기의 주요 하중 지지 부품은 대부분 용접 부품을 사용합니다. 항공기 동체는 비행 중 큰 압력을 받기 때문에 용접 요구 사항이 비교적 엄격하며, 용접 로봇은 자동 용접 이음매 추적 기술을 통해 용접 매개변수를 유연하게 설정하여 항공기 구조를 정확하게 용접할 수 있습니다.
기계 유지관리
- 와이어 공급 메커니즘. 와이어 공급 거리 정상 여부, 와이어 공급 도관 손상 여부, 이상 경보 발생 여부 포함; 가스 흐름 정상 여부; 용접 토치 안전 보호 시스템 정상 여부 (안전 보호 작업 시 용접 토치 작동 중단 금지); 물 순환 시스템 정상 작동 여부; TCP 테스트 (테스트 프로그램을 컴파일하여 매 교대 근무 후 실행하는 것이 권장됨)
2. 주간 점검 및 유지 관리
1. 로봇의 각 축을 문지릅니다. TCP의 정확도를 확인합니다. 잔류 오일 레벨을 확인합니다. 로봇의 각 축의 영점 위치가 정확한지 확인합니다. 용접기 물탱크 뒤의 필터를 청소합니다. 압축 공기 입구의 필터를 청소합니다. 용접 토치 노즐의 불순물을 청소하여 물 순환이 막히지 않도록 합니다. 와이어 공급 휠, 와이어 프레싱 휠 및 와이어 가이드 튜브를 포함한 와이어 공급 메커니즘을 청소합니다. 호스 묶음과 가이드 와이어 호스가 손상되거나 파손되었는지 확인합니다. (호스 묶음을 모두 제거하고 압축 공기로 청소하는 것이 좋습니다.) 용접 토치 안전 보호 시스템이 정상인지, 외부 비상 정지 버튼이 정상인지 확인합니다.